Overview
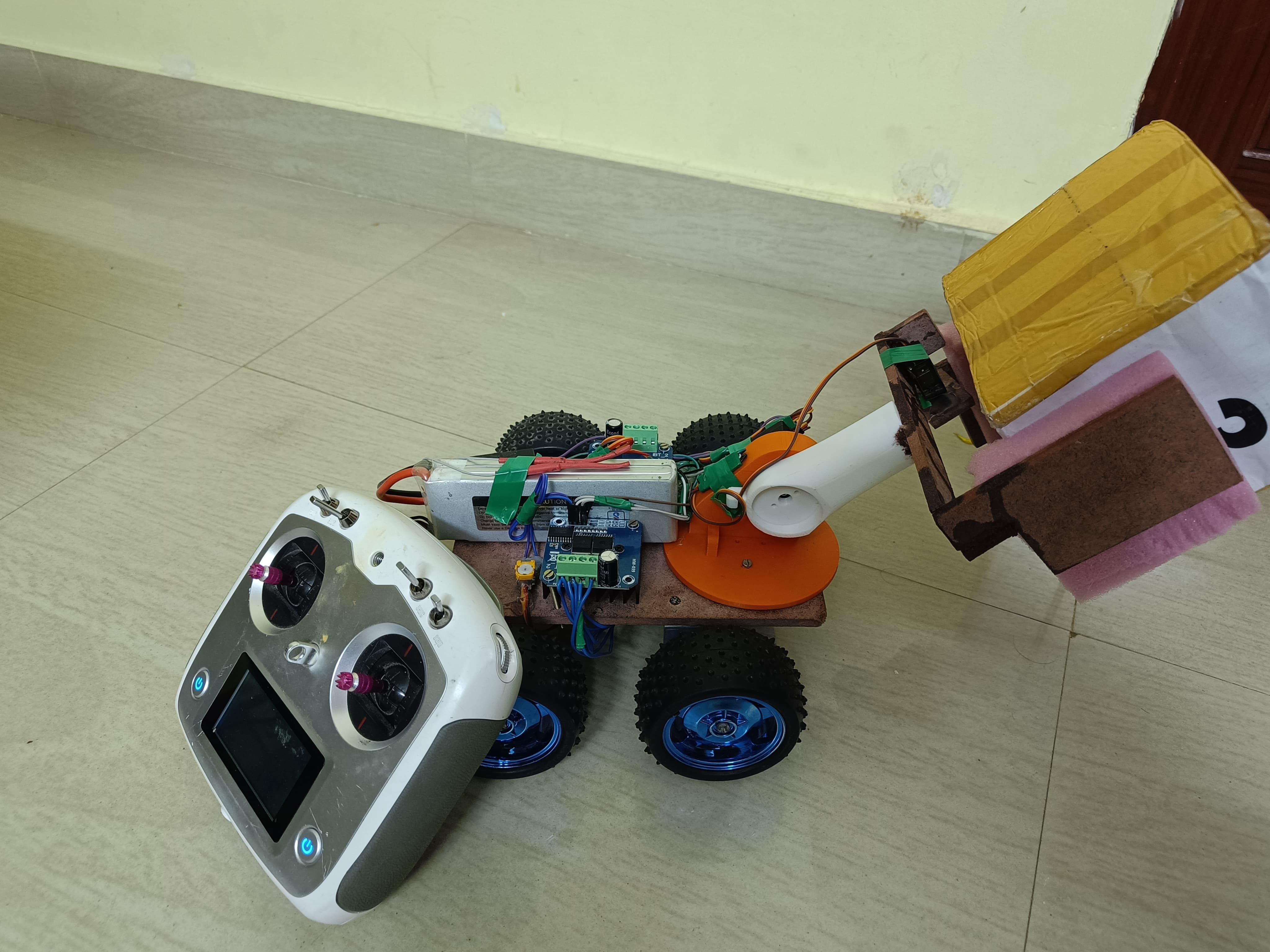
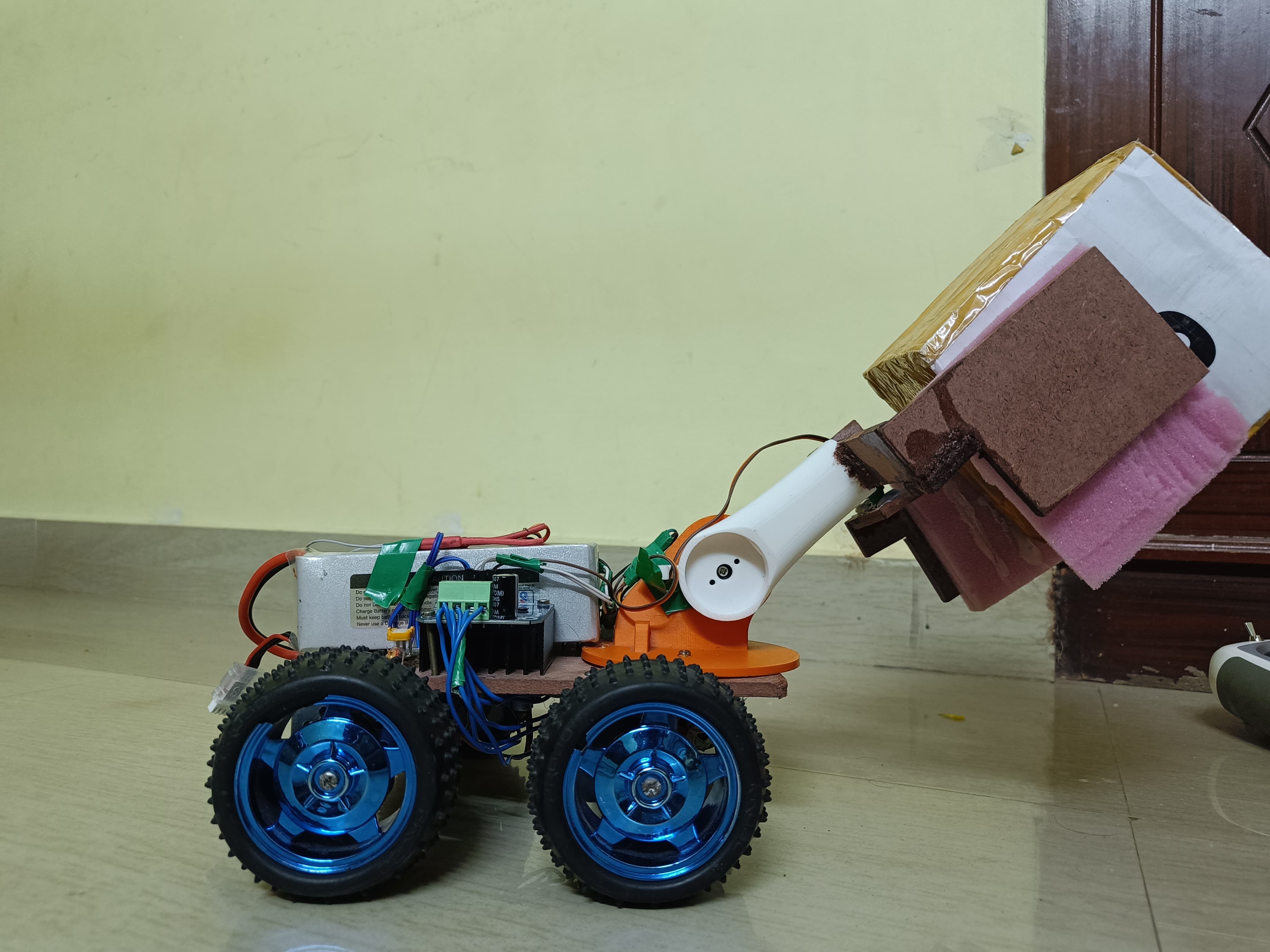
This pick and place robot was developed for IIT Bombay Techfest to demonstrate precision automation. It uses a gripper arm controlled by Arduino to pick objects from one location and place them in another. The mechanism is ideal for industrial prototyping and automation demonstrations, particularly in logistics and material handling environments.
Challenges & Solutions
Challenge: Mechanical Precision
Gripper misalignment caused issues while picking up small or lightweight objects.
Solution: We redesigned the claw with rubber padding for better grip and fine-tuned servo angles using PWM calibration, improving accuracy by 35%.
Challenge: Load Stability
Objects occasionally dropped during movement due to vibration or tilt.
Solution: Introduced smoother acceleration and deceleration profiles via motor driver code adjustments, significantly enhancing load stability during transport.